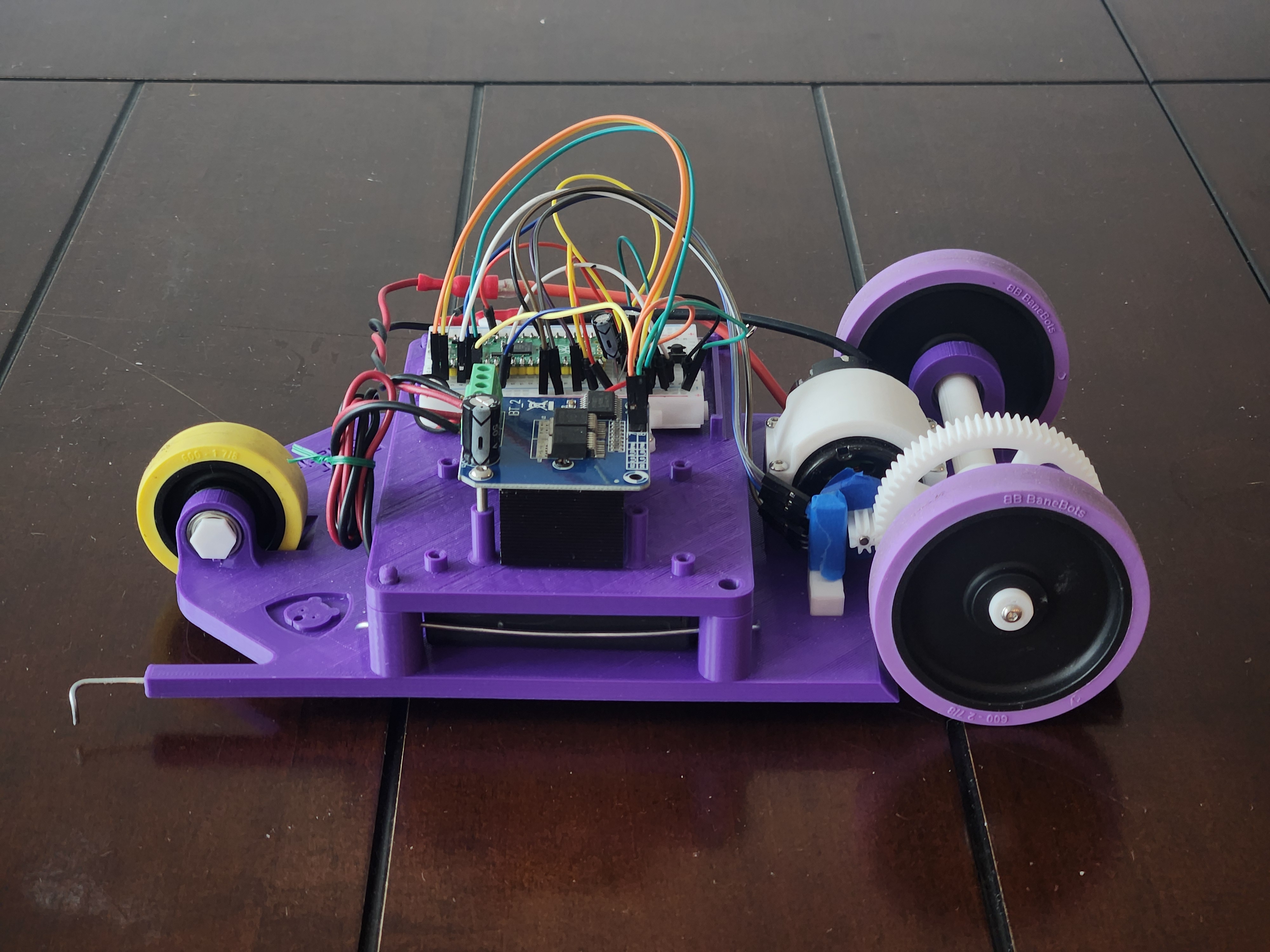
Electric Vehicle - Science Olympiad
I built this as a demonstration vehicle to assist in coaching a local school's Science Olympiad division C event. The competition is to drive as close as possible to a target distance and in as little time as possible. The sum of the vehicle distance to the target and the measured run time is the score. Lowest score wins. I achieve this by using an encoder and implementing PID control using a microcontroller.
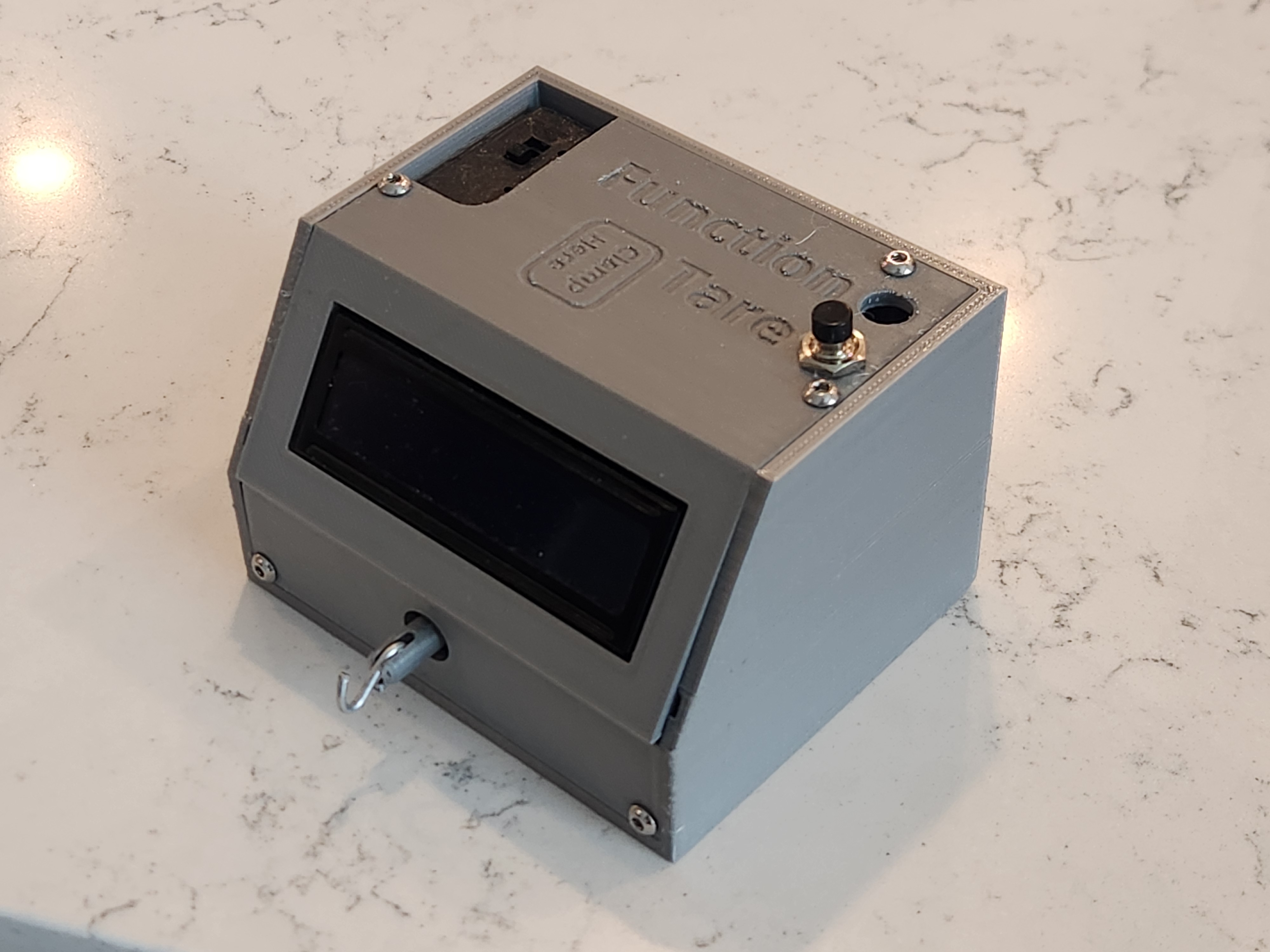
Electronic Torque Meter
This device measures the torque of a rubberband as it's being wound. This is the first time I designed and implemented a custom PCB.
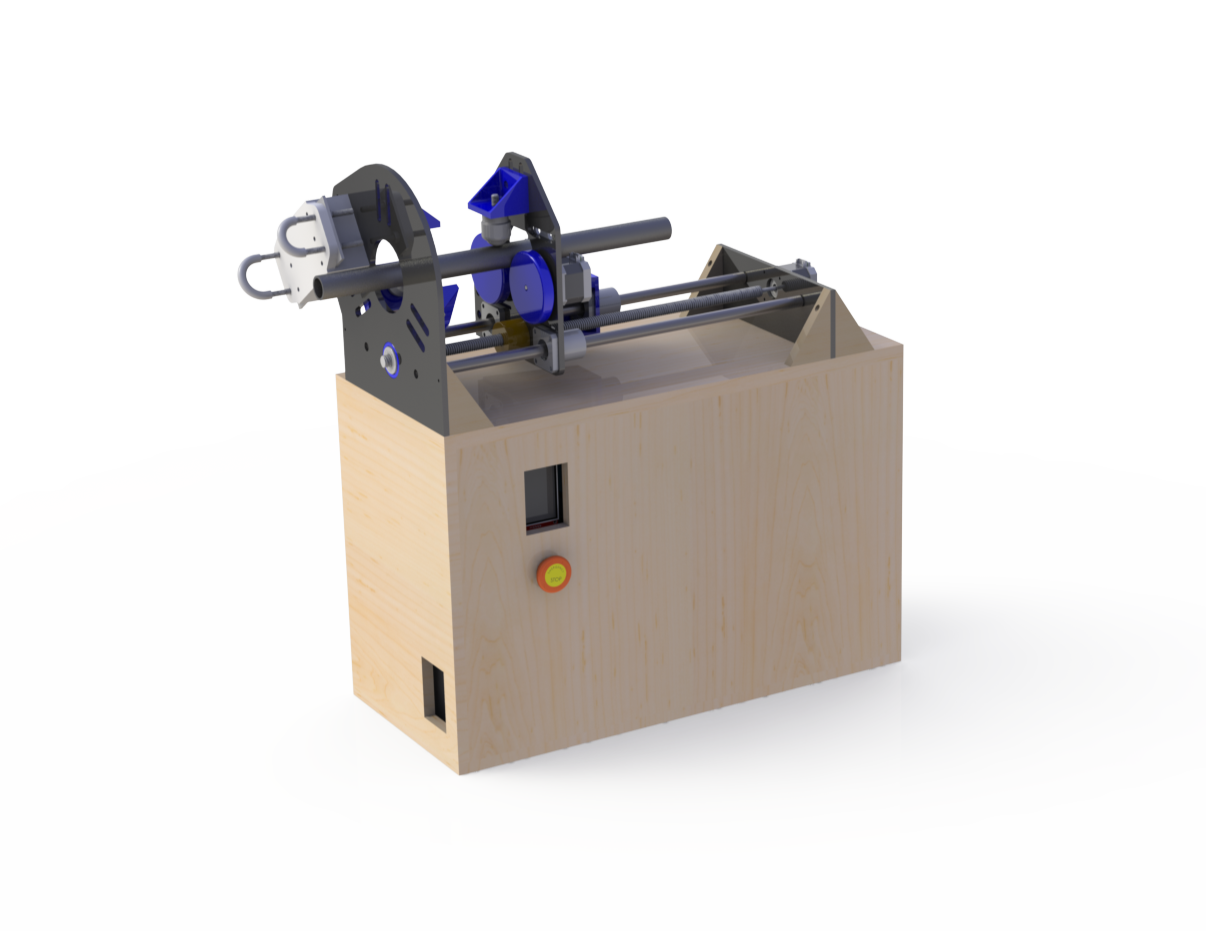
CNC Plasma Tube Notcher - Bx3C
I and three other people built this project for senior design. See our marketing poster here.